Constant Volume Energy Minimization Tutorial#
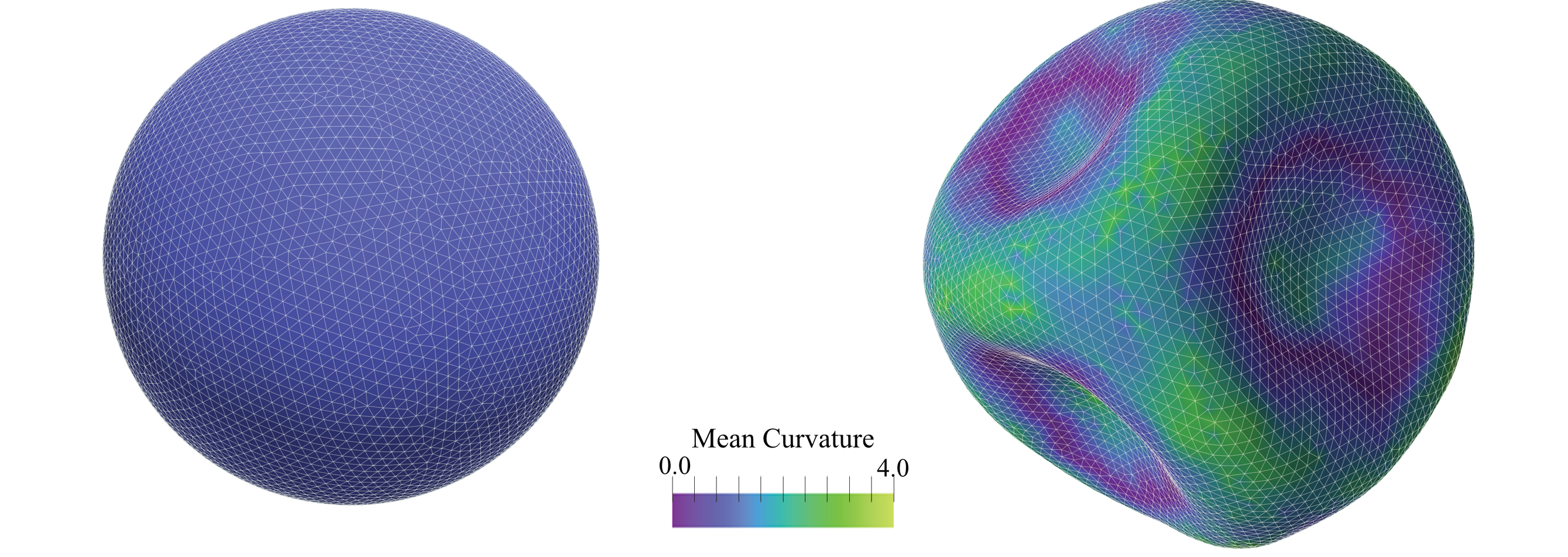
Figure: (Left) Initial configuration of a vesicle with unit radius comprising $N=6281$ vertices. The vesicle is subjected to a strain by increasing the edge rest length as $l_0 = (1+epsilon) left<l_eright>$, where $epsilon = 0.1$ and $left<l_eright>$ denotes the average edge length of the mesh. As a result, the vesicle buckles, leading to surface wrinkles, as depicted in (Right). The colour bar indicates the local mean curvature. The final shape of the vesicle, after energy minimization under volume constraint, is obtained using the FIRE method#
Introduction#
This example performs constant-volume energy minimization of a closed elastic vesicle. The example is useful when you want a deterministic relaxation step instead of a dynamics or Monte Carlo trajectory.
What This Example Demonstrates#
The example loads the packaged vesicle mesh files
vertices_R1.0_l01.inp and faces_R1.0_l01.inp, computes the average edge
length, increases the harmonic rest length to impose strain, adds a limit
force, adds dihedral bending, and then minimizes the energy with the
Mesh>Fire minimizer while enforcing a constant-volume constraint. It writes
initial mesh.vtk and minimization_t*.vtk snapshots. --quick keeps
the same physical scenario and parameters but reduces the number of snapshots
and FIRE iterations.
How to Run#
python -m pymembrane.examples.minimizer --quick
To write outputs to a separate directory:
python -m pymembrane.examples.minimizer --quick --output-dir results
Inputs#
packaged mesh files:
vertices_R1.0_l01.inpandfaces_R1.0_l01.inpoutput directory: current working directory unless
--output-diris used
Model Ingredients#
mesh: closed vesicle mirrored under
docs/examples/minimizerforces:
Mesh>Harmonic,Mesh>Limit,Mesh>Bending>Dihedralminimizer:
Mesh>Fireconstraint:
Mesh>Volumeboundary condition: non-periodic
Expected Output#
initial mesh.vtkminimization_t0.vtkadditional
minimization_t*.vtksnapshotsoutput format: legacy ASCII
.vtk
Quick Mode#
Quick mode keeps the same model and constraint, but reduces snapshots and FIRE iterations.
The mirrored source version of this example is kept under
docs/examples/minimizer/__main__.py. The installed version under
pymembrane.examples.minimizer is the primary runnable interface.
Minimal Workflow#
import numpy as np
import pymembrane as mb
box = mb.Box(40, 40, 40)
system = mb.System(box)
system.read_mesh_from_files(files={"vertices": "vertices_R1.0_l01.inp", "faces": "faces_R1.0_l01.inp"})
evolver = mb.Evolver(system)
compute = system.compute
edge_lengths = compute.edge_lengths()
avg_edge_length = np.mean(edge_lengths)
evolver.add_force("Mesh>Harmonic", {"k": {"0": "400.0"}, "l0": {"0": str(1.1 * avg_edge_length)}})
evolver.add_force("Mesh>Limit", {"lmin": {"0": str(0.5 * np.min(edge_lengths))}, "lmax": {"0": str(2.0 * np.max(edge_lengths))}})
evolver.add_force("Mesh>Bending>Dihedral", {"kappa": {"0": "1.0"}})
evolver.add_minimizer("Mesh>Fire", {"dt": "1e-2", "max_iter": "2000", "ftol": "1e-2", "etol": "1e-4"})
evolver.add_constraint("Mesh>Volume", {"V": str(compute.volume()), "max_iter": "10000", "tol": "1e-5"})
evolver.minimize()
system.dumper.vtk("output")
How to visualize the result#
Open the VTK files in ParaView to compare the initial and minimized vesicle shapes and inspect the wrinkled morphology.